First things first, the end product can be viewed here:
Parts
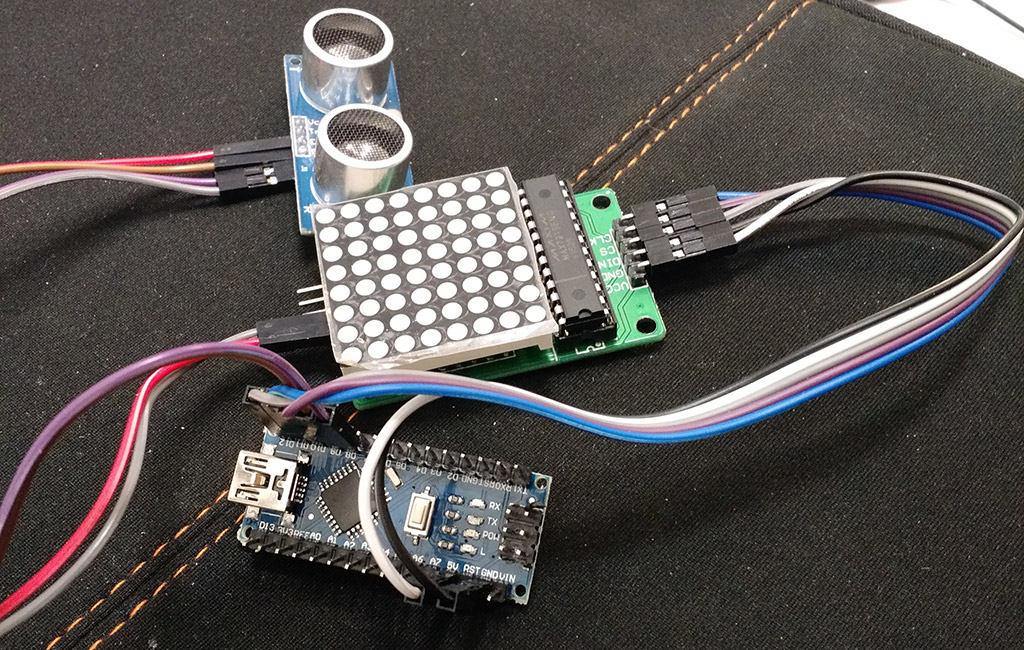
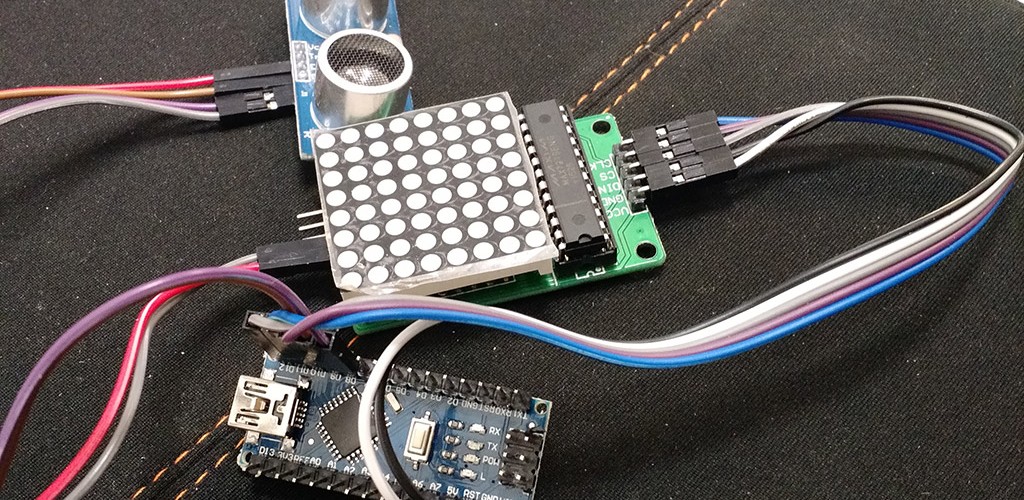
All the parts. From top: HC-SR04 sensor, 8×8 LED matrix display, Arduino Nano (clone)
- Arduino (Nano, Uno, whatever fits your need) with a power source
- HC-SR04 distance sensor
- MAX7219 based 8×8 LED matrix display
- 9 connection wires
Wiring
Lets start with the 8×8 display:
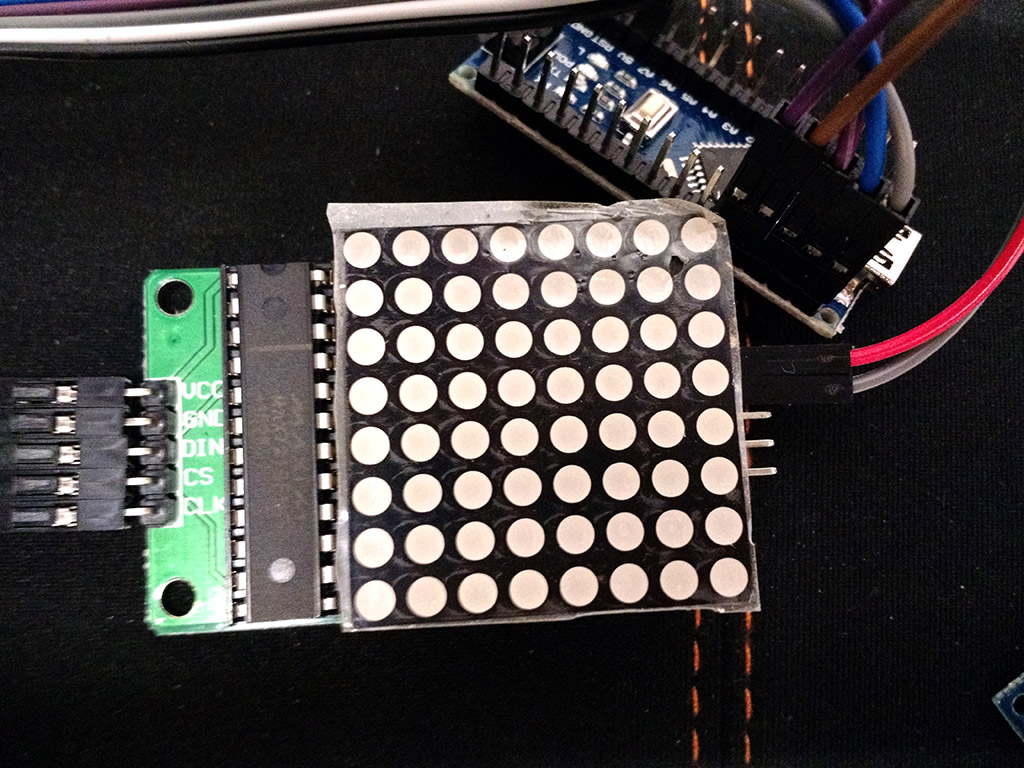
- VCC to Nano 5V (white)
- GND to Nano GND (black)
- DIN to Nano Digital pin 12 (gray)
- CS to Nano Digital pin 10 (purple)
- CLK to nano Digital pin 11 (blue)
And then the distance sensor. Since it needs 5V and ground connections too, we’re using the 8×8 LED display’s output pins. They are there to make chaining the 8×8 displays easy, but can be naturally used for other sensors, too. Pin order is same as on the input ones.
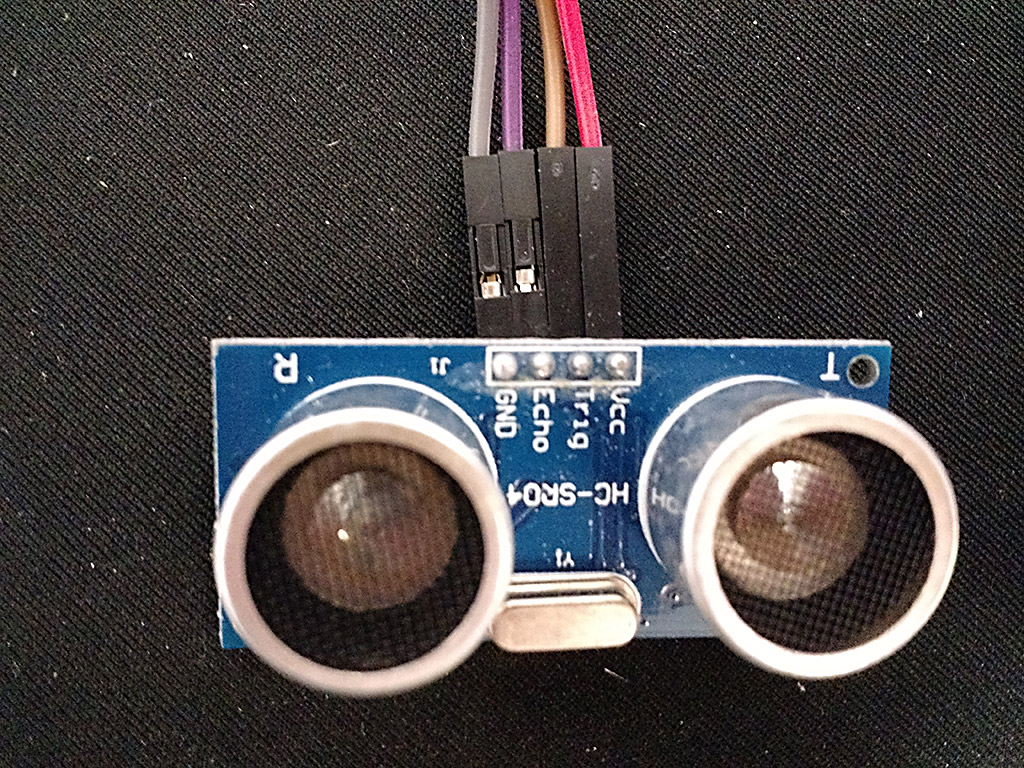
- VCC to 8×8 LED display VCC out (red)
- GND to 8×8 LED display GND out (gray)
- Trig to Nano Digital pin 9 (brown)
- Echo to Nano Digital pin 8 (purple, again 😉 )
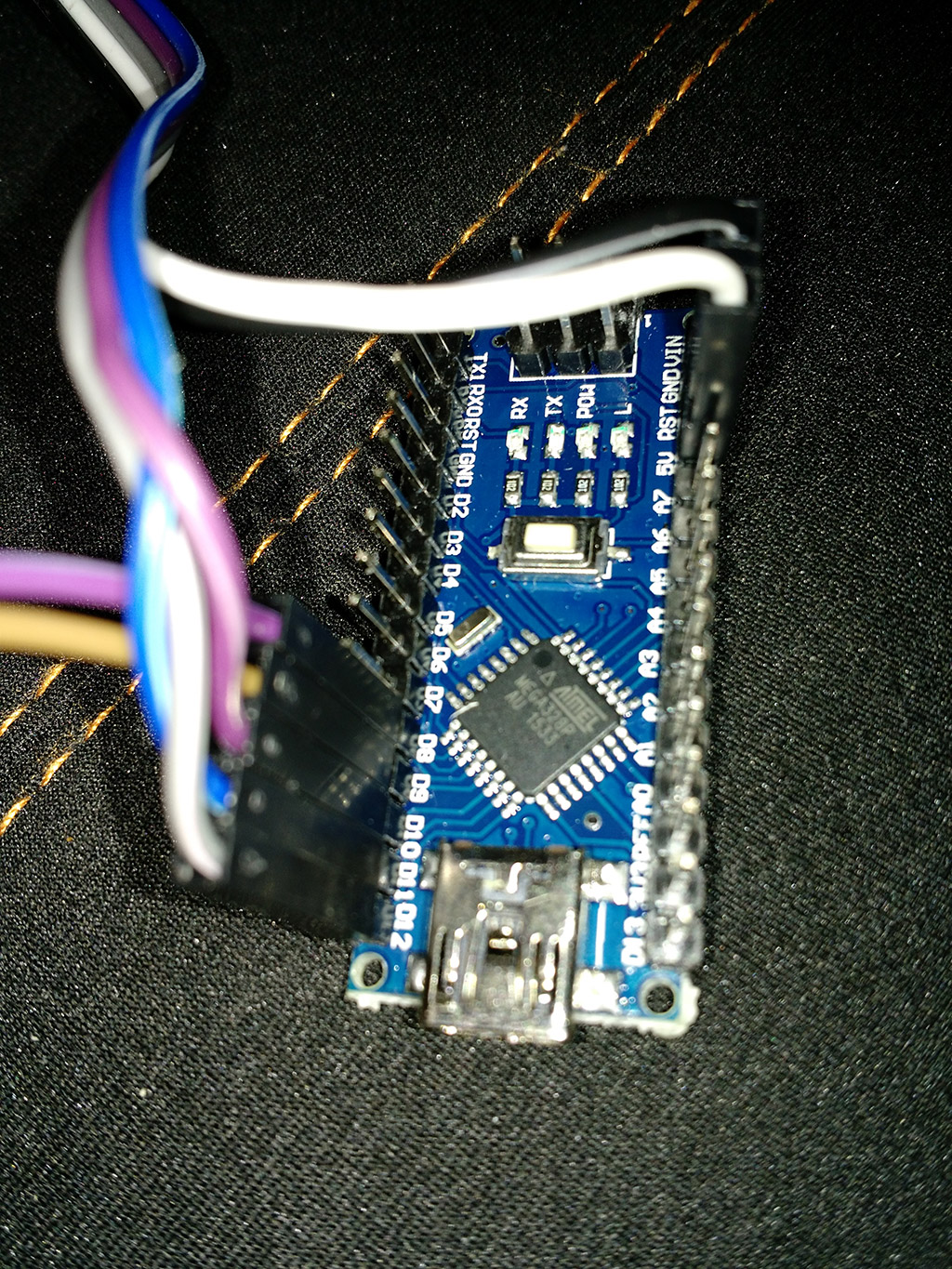
And how they look like on the Nano:
Code
This is my “first draft” code which is still under development (and uses example code for initialization, etc from LedControl examples, etc)..
The code uses LedControl library which can be installed through the compiler or downloaded from here. Note that the pins can be changed if you need to use a different configuration.
For actual use, the delay with water level reading should be set to minutes and any obviously erroneous readings should result into a re-read. (Sometimes the sensor reading will result in the display blanking out until it can get a “good” reading.)
//We always have to include the library
#include "LedControl.h"
// Distance sensor pins
#define trigPin 9
#define echoPin 8
/*
pin 12 is connected to the DataIn
pin 11 is connected to the CLK
pin 10 is connected to LOAD
*/
LedControl lc=LedControl(12,11,10,1);
/* we always wait a bit between updates of the display */
unsigned long delaytime=100;
unsigned int cnt = 0;
/* sensor calibration from fluid level, in CM
This is how far your sensor is from the actual, maximum fluid level */
unsigned long calibration = 10;
/* bytecode for the 8x8 images */
static byte waterlevel[][8] = {
{B00000000,B01100101,B10010101,B10010110,B10010110,B10010101,B01100101,B00000000}, // OK
{B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B11111111}, // water level, low
{B00000000,B00000000,B00000000,B00000000,B00000000,B00000000,B10101101,B11111111},
{B00000000,B00000000,B00000000,B00000000,B00000000,B10101101,B11111111,B11111111},
{B00000000,B00000000,B00000000,B00000000,B11010011,B11111111,B11111111,B11111111},
{B00000000,B00000000,B00000000,B10111010,B11111111,B11111111,B11111111,B11111111},
{B00000000,B00000000,B10110101,B11111111,B11111111,B11111111,B11111111,B11111111},
{B00000000,B10110110,B11111111,B11111111,B11111111,B11111111,B11111111,B11111111},
{B11010101,B11111111,B11111111,B11111111,B11111111,B11111111,B11111111,B11111111},
{B11111111,B11111111,B11111111,B11111111,B11111111,B11111111,B11111111,B11111111} // water level, high
};
void setup() {
/*
The MAX72XX is in power-saving mode on startup,
we have to do a wakeup call
*/
lc.shutdown(0,false);
/* Set the brightness to a medium values */
lc.setIntensity(0,2);
/* and clear the display */
lc.clearDisplay(0);
/* Distance sensor */
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void showlevel(unsigned int cnt) {
unsigned int i=0;
for (i=0;i<=7;i++) { /* 8 rows, display 0..7 */
lc.setRow(0,i,waterlevel[cnt][i]);
}
}
void loop() {
long duration, distance;
digitalWrite(trigPin, LOW); // get ready to measure
delayMicroseconds(2); // wait
digitalWrite(trigPin, HIGH); // send measuring signal
delayMicroseconds(10); // for 10us
digitalWrite(trigPin, LOW); // end signal
duration = pulseIn(echoPin, HIGH); // wait for input signal (rebound)
distance = (duration/2) / 29.1; // calculate speed of sound to meters, speed is ~340ms, ie. ~1.7cm per us
cnt = 0;
if (distance < 50 + calibration) {cnt++;}
if (distance < 40 + calibration) {cnt++;}
if (distance < 35 + calibration) {cnt++;}
if (distance < 30 + calibration) {cnt++;}
if (distance < 25 + calibration) {cnt++;}
if (distance < 20 + calibration) {cnt++;}
if (distance < 15 + calibration) {cnt++;}
if (distance < 10 + calibration) {cnt++;}
if (distance < 5 + calibration) {cnt++;}
lc.setIntensity(0,2+cnt/2); // increase intensity as distance shortens
showlevel(cnt); // draw the image to the display
delay(delaytime); // wait
lc.clearDisplay(0); // clear display, or we will have LEDs that were on, stay that way
}
The code is also available at github.
Now all that is needed is to actually package this thing (moisture and cold proof, as I’m planning to use mine outside all year around) and solve what kind of power supply I will use.